研究紹介
概要
運転可否の判断ガイドラインが未整備な高次脳機能障がい者を対象に,装着型センサを用いた自動車運転技能評価システムの構築を目指した研究です.
背景
脳卒中や脳腫瘍,頭部外傷などにより脳の一部に損傷を受け,注意障がいや記憶障がいなどの欠損症状,精神症状,行動異常などを呈するようになった状態を高次脳機能障がいと呼びます.高次脳機能障がいは,治療によって症状の回復が見込まれますが,治療過程における車の運転が危険なことがあります.高次脳機能障がいは,現状,運転可否の判断ガイドラインが未整備であり,医師であっても実質的に根拠ある判断が困難です.運転が不適正な患者に対して適性と誤判断して事故を起こしてしまう危険性や,逆に運転が適正な患者に対して不適正と誤判断して患者の社会参画の機会を減らしてしまう危険性を考慮すると,運転適性の判断に二の足を踏むことになります.
目的
我々はこの問題を解決すべく,医療機関,運転免許センターと共同で,装着型センサを用いた実車による高次脳機能障がい者向け運転技能評価システムの構築を目指した研究を進めています.
手法
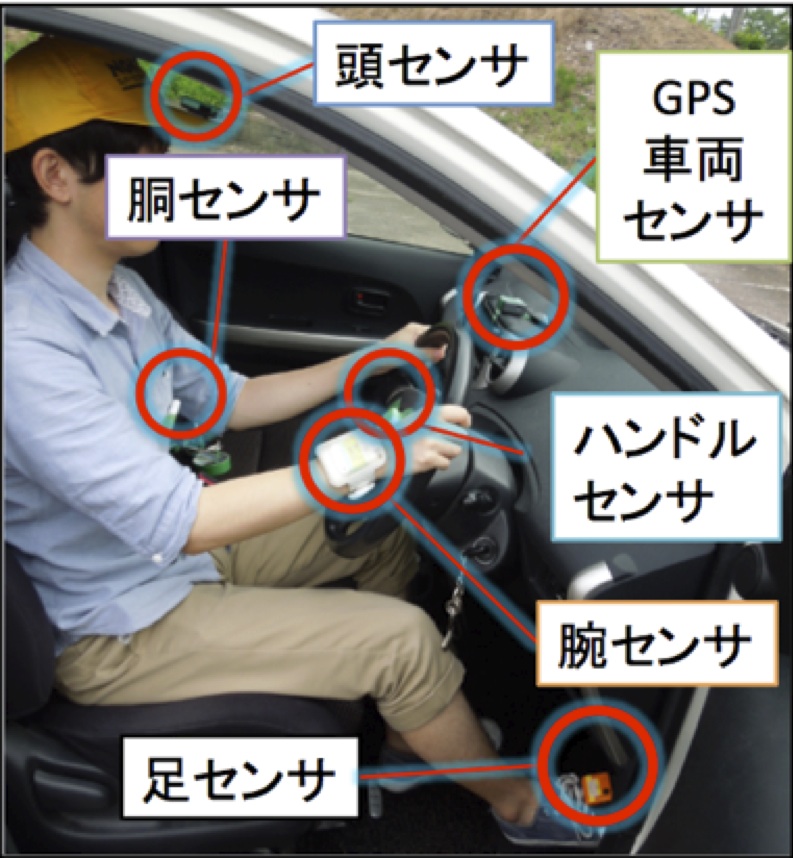
これまで,高次脳機能障がい者十数名に加速度や角速度などを計測できる小型センサを装着してもらい,運転免許試験官同乗のもと普段運転している車や教習車で技能試験コースを運転してもらう実験を実施しました.取得した運転挙動データの分析を通し,車線変更時に行う一連の確認行動の順序や高速走行からカーブに向けての計画的な減速,T字交差点進入時の首振り確認動作の角度について,高次脳機能障がい者特有の安全運転に関わる行動を検出できる見込みが得られました.

概要
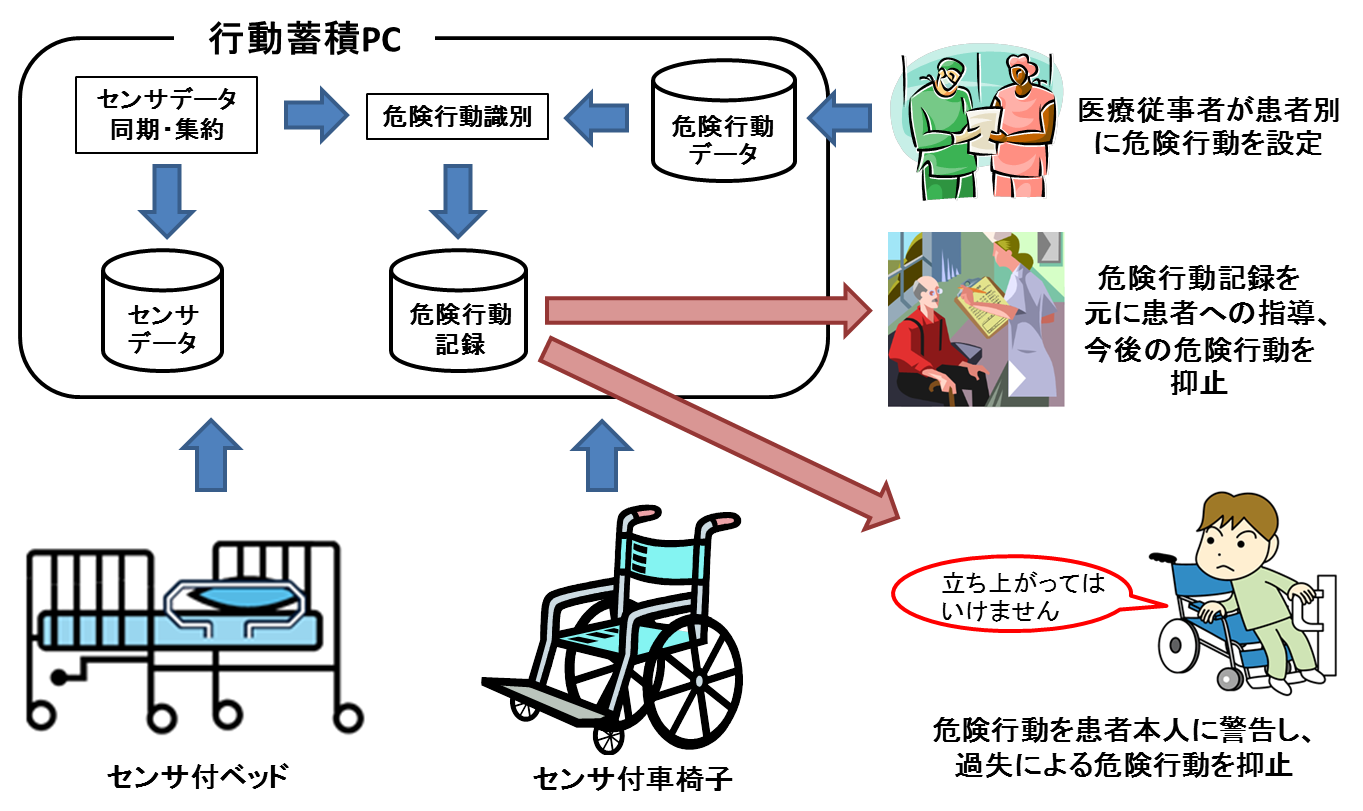
患者の事故につながる行動を防止するため,センサを装着した福祉用具を用いて患者の行動を検知し,危険な行動に対する警告等をするシステムの構築.
背景
現在,日本では急速に高齢化が進んでおり,医師不足の観点から,入院医療を中心とする医療から,在宅医療も重視した医療へとシフトされてきている.しかし在宅での療養では,家族や医療従事者が患者を四六時中見守ることは難しく,目の届かない場所で危険な行動を行い,事故を起こして再入院してしまうという事例がある.
目的
福祉用具にセンサを装着し,患者の危険な行動を検知することにより,事故を防止する見守りシステムの構築を行う.
手法
患者が日常生活で特に使用する機会が多い車椅子,ベッド,トイレの手すりにセンサを取り付け,センサから得られるデータを元に患者の危険行動を識別し,危険行動を検出した際は患者への警告や指導を促す.しかし,危険行動は患者の症状や性格により異なるため,医療従事者のみ定義することができるものである.そこで,行動を「左肘掛を押す」や「右足置きから足を降ろす」といった行動要素に分解し,行動要素の組み合わせや順序,時間などの条件から行動を識別する手法を用い,行動要素の組み合わせで無数の行動を表現する.これにより,医療従事者が定義する危険行動に対応して患者一人一人に合わせた危険行動を識別するシステムを構築することが可能である.

概要
小型のウェアラブルセンサを用い,医療現場における看護師を対象とした正しい指差し呼称の自動検出システムの構築.
背景
指差し呼称とは,駅で車掌が行っているような,対象を目視し,大きく指差し,「よし」や「確認」などと発声する確認方法である.これは,ヒューマンエラーの低減に有効だとされているが,指差し呼称の現場における定着率は高くないというのが現状である.また,指差し呼称の報告は職員,従業員による自己申告制であり,主観的な報告のため申告内容の信頼性に欠ける.現場管理者による監視作業は網羅性に欠け,監視作業自体が非効率である.そのため,現場管理者による実施状況の把握が必要であるが,実施状況の効率的な把握方法が存在しない.
目的
医療現場での看護師のヒューマンエラーにより起こる医療事故を減らすため,正しい指差し呼称を機械的に検出するシステムを開発する.
手法

看護業務の妨げとならないよう,上腕に角加速度センサ,頭部に小型無線ヘッドセットマイクを取り付ける.上腕加速度・角速度データおよび音声データを取得し、それらのデータを解析することによって、看護師が指差し呼称を正しく行ったことを検出する.
概要
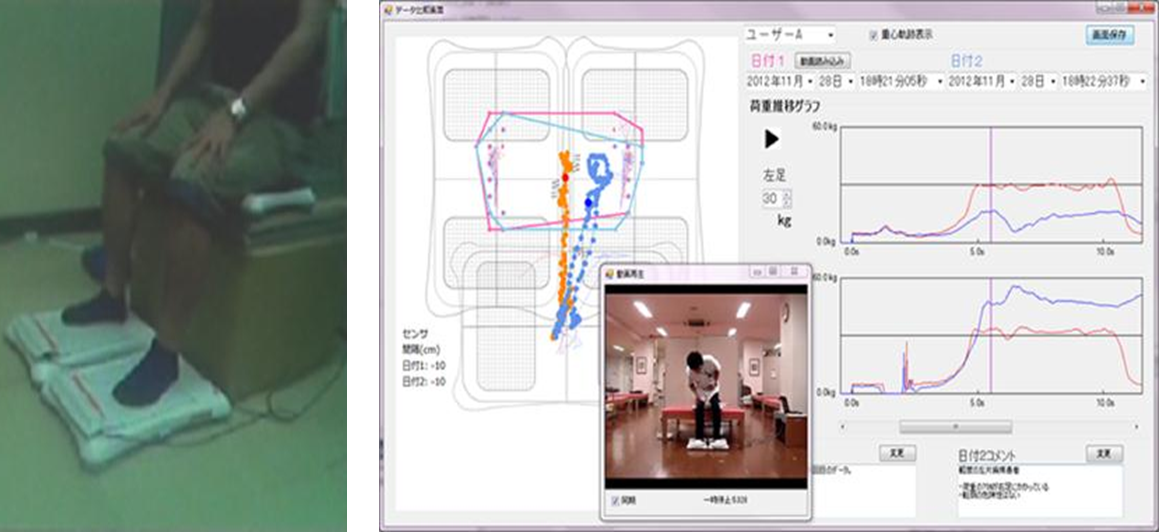
リハビリ患者の立ち上がり動作の評価を支援するために,センサ技術を用い,動作の評価に有効なバランス情報を可視化するシステムを作成する.
背景
立ち上がり動作は,リハビリ患者の基本的動作能力評価の必須動作として重要視されている.
目的
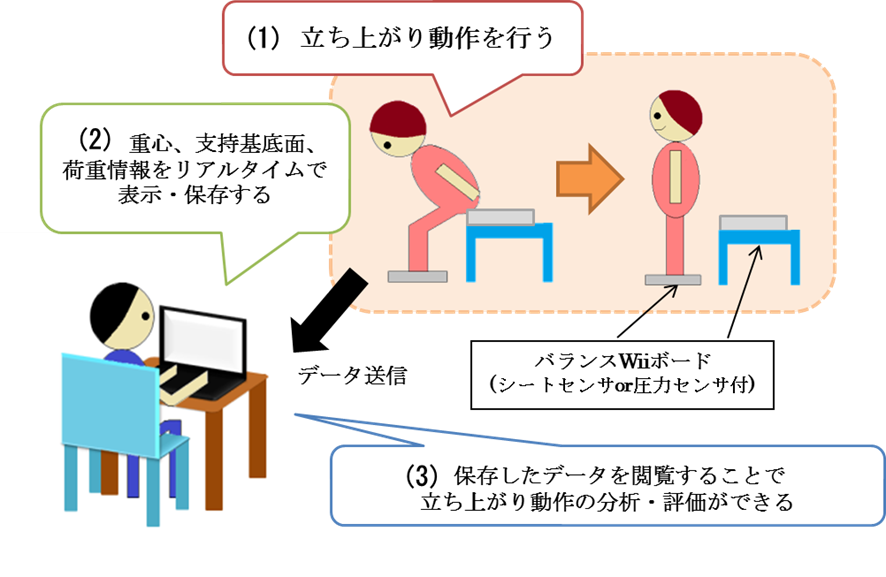
立ち上がり動作の評価に有効なバランス情報である重心推移・左右それぞれの足にかかる荷重量・支持基底面を可視化し,現場で使用可能なシステムを開発する.
手法
臀部・左右の足下にバランスWiiボードおよび,シート上に配置した圧力センサもしくはシートセンサを設置し,その上で立ち上がり動作を行うことで,立ち上がり動作時の重心推移・左右それぞれの足にかかる荷重量,支持基底面の3種類のバランス情報を取得・保存する.保存したデータを閲覧・分析することで,リハビリ患者の立ち上がり動作の評価が可能となる.
概要
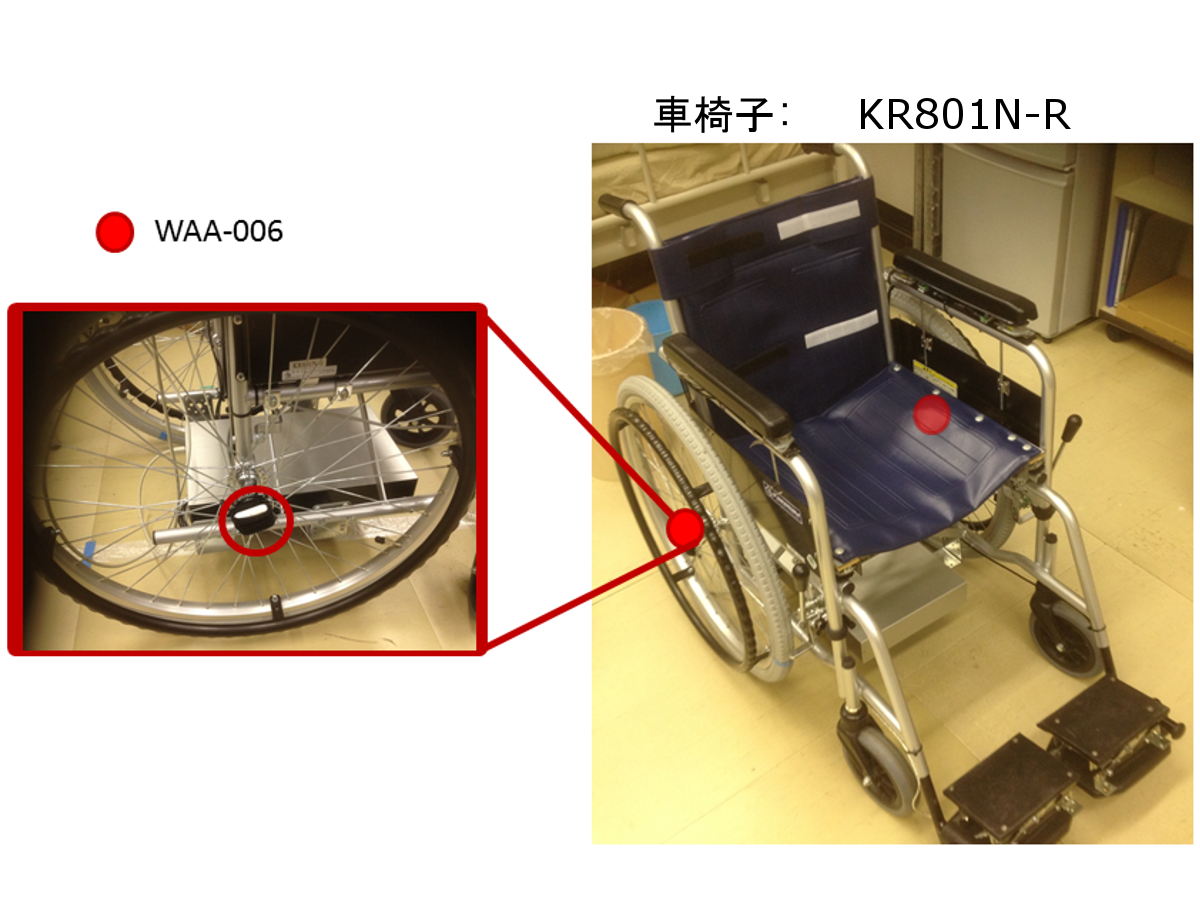
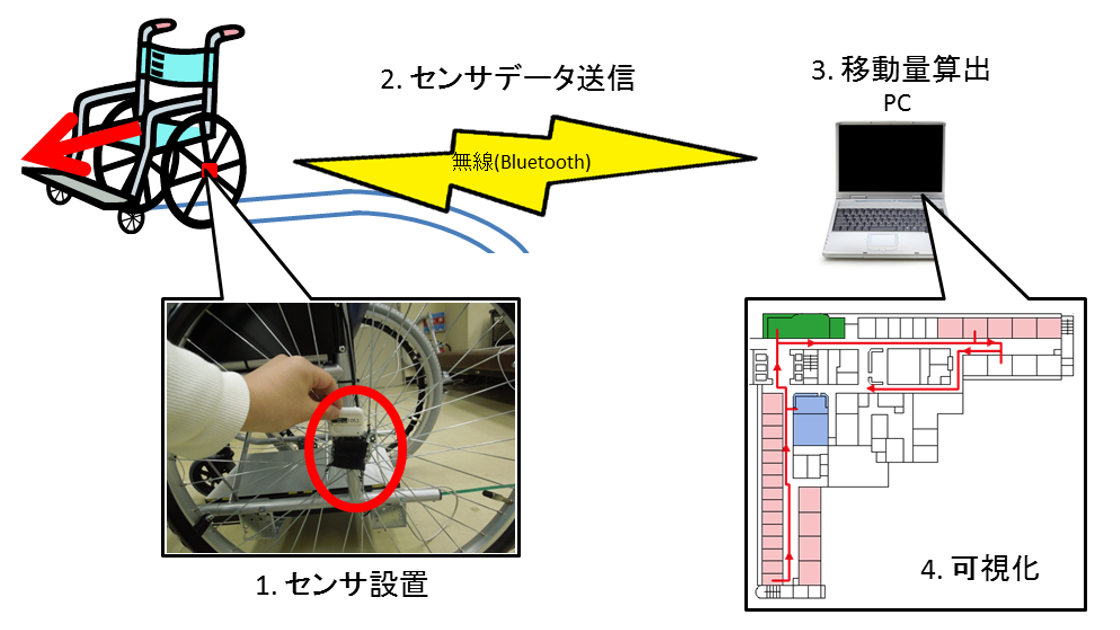
車椅子の屋内位置推定のシステムを構築する.
背景
病院内やリハビリテーション施設では多くの車椅子患者が生活している.車椅子に乗った認知症の老人が,勝手に院内を徘徊し行方が分からなくなる事や,危険な場所へ行き怪我をする事がある.そのため,車椅子患者の位置を特定する必要がある.さらに車椅子患者の位置を特定できれば,院内のナビゲーションや情報配信サービスなど様々なサービスの実現に繋がると考えられる.携帯電話やモバイルPCなどに用いられる位置推定手法としてGPSが挙げられるが,屋内などGPS衛星の電波を受け取れない場所では,位置推定を利用したサービスを受けられない.このような問題から,車椅子患者の屋内位置推定手法を確立する必要がある.
目的
車椅子の屋内位置推定システムを構築する.
手法
車椅子の左右の大車輪に加速度・角速度センサを装着する.センサからBluetoothで送信される加速度データ・角速度データをPCで取得し,加速度データから微小時間での重力加速度の向きに対するセンサの回転角度を求める.これにより,車椅子の移動量や向きが分かり屋内での位置が求まる.微小時間での重力加速度の向きに対するセンサの回転角度θg[rad]は,x軸方向の加速度データgx[G], y軸方向の加速度データgy[G]から次式で求まる.

大車輪の移動量d[m]は,大車輪の微小時間での回転角度⊿θg[rad],大車輪の円周C[m]から次式で求まる.

車椅子の回転角度⊿θ[rad]は,左側の大車輪の移動量をd1[m],右側の大車輪の移動量をd2[m],左右の大車輪間の長さをl[m]とすると次式で求まる.

車椅子の横方向の移動量⊿x[m],正面方向の移動量⊿y[m]は,それぞれ次式で求まる.


車椅子の移動量を積分することでスタート地点を原点とした相対座標が求まる.